저번에 InforGAN에 대해 논문 리뷰를 해보았는데, 오늘은 MNIST 데이터셋에 대해서 InfoGAN에 대해 적용시켜 실제로 특징을 잘 학습하는지 확인해보도록 하겠습니다. (구글 코랩 기준으로 작성)
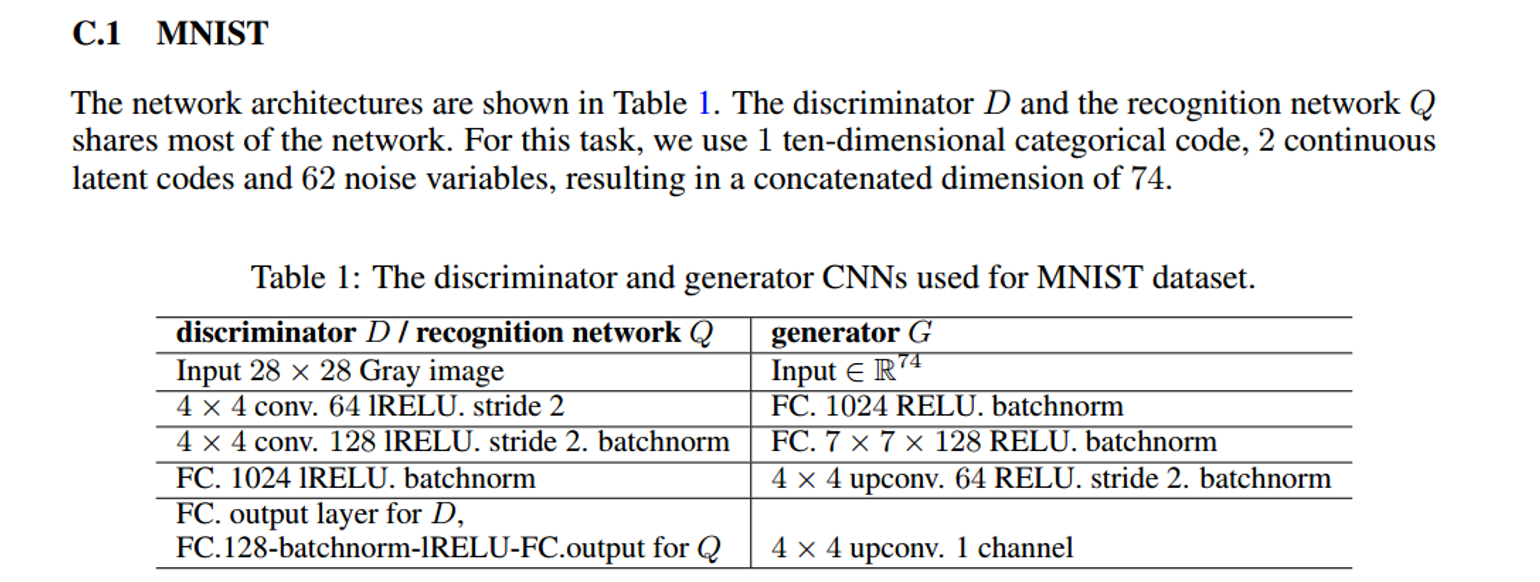
MNIST는 아래와 같은 아키텍쳐로 코드를 구현하셨습니다.
Import
from tqdm import tqdm
import time
import os
import numpy as np
import cv2
import torch
import torch.nn as nn
import torchvision.transforms as transforms
import torchvision.datasets as dset
import matplotlib.pyplot as plt
import torchvision.utils as vutils
import time
import torch.optim as optim
from PIL import Image
from torch.utils.data import Dataset,DataLoader
# Dictionary storing network parameters. 설정한 파라미터
params = {
'batch_size': 128,# Batch size.
'num_epochs': 30,# Number of epochs to train for.
'learning_rate': 2e-4,# Learning rate.
'beta1': 0.5,
'beta2': 0.999,
'save_epoch' : 25,# After how many epochs to save checkpoints and generate test output.
'dataset' : 'MNIST'}# Dataset to use. Choose from {MNIST, SVHN, CelebA, FashionMNIST}. CASE MUST MATCH EXACTLY!!!!!
데이터셋 불러오기
import torch
import torchvision.transforms as transforms
import torchvision.datasets as dsets
# Directory containing the data.
root = 'data/'
def get_data(dataset, batch_size):
# Get MNIST dataset.
if dataset == 'MNIST':
transform = transforms.Compose([
transforms.Resize(28),
transforms.CenterCrop(28),
transforms.ToTensor()])
dataset = dsets.MNIST(root+'mnist/', train='train',
download=True, transform=transform)
# Get FashionMNIST dataset.
elif dataset == 'FashionMNIST':
transform = transforms.Compose([
transforms.Resize(28),
transforms.CenterCrop(28),
transforms.ToTensor()])
dataset = dsets.FashionMNIST(root+'fashionmnist/', train='train',
download=True, transform=transform)
# Get CelebA dataset.
# MUST ALREADY BE DOWNLOADED IN THE APPROPRIATE DIRECTOR DEFINED BY ROOT PATH!
# Create dataloader.
dataloader = torch.utils.data.DataLoader(dataset,
batch_size=batch_size,
shuffle=True)
return dataloaderModel
import torch
import torch.nn as nn
import torch.nn.functional as F
class Generator(nn.Module):
def __init__(self):
super().__init__()
self.tconv1 = nn.ConvTranspose2d(74, 1024, 1, 1, bias=False)
self.bn1 = nn.BatchNorm2d(1024)
self.tconv2 = nn.ConvTranspose2d(1024, 128, 7, 1, bias=False)
self.bn2 = nn.BatchNorm2d(128)
self.tconv3 = nn.ConvTranspose2d(128, 64, 4, 2, padding=1, bias=False)
self.bn3 = nn.BatchNorm2d(64)
self.tconv4 = nn.ConvTranspose2d(64, 1, 4, 2, padding=1, bias=False)
def forward(self, x):
x = F.relu(self.bn1(self.tconv1(x)))
x = F.relu(self.bn2(self.tconv2(x)))
x = F.relu(self.bn3(self.tconv3(x)))
img = torch.sigmoid(self.tconv4(x))
return img
class Discriminator(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 64, 4, 2, 1)
self.conv2 = nn.Conv2d(64, 128, 4, 2, 1, bias=False)
self.bn2 = nn.BatchNorm2d(128)
self.conv3 = nn.Conv2d(128, 1024, 7, bias=False)
self.bn3 = nn.BatchNorm2d(1024)
def forward(self, x):
x = F.leaky_relu(self.conv1(x), 0.1, inplace=True)
x = F.leaky_relu(self.bn2(self.conv2(x)), 0.1, inplace=True)
x = F.leaky_relu(self.bn3(self.conv3(x)), 0.1, inplace=True)
return x
class DHead(nn.Module):
def __init__(self):
super().__init__()
self.conv = nn.Conv2d(1024, 1, 1)
def forward(self, x):
output = torch.sigmoid(self.conv(x))
return output
class QHead(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1024, 128, 1, bias=False)
self.bn1 = nn.BatchNorm2d(128)
self.conv_disc = nn.Conv2d(128, 10, 1)
self.conv_mu = nn.Conv2d(128, 2, 1)
self.conv_var = nn.Conv2d(128, 2, 1)
def forward(self, x):
x = F.leaky_relu(self.bn1(self.conv1(x)), 0.1, inplace=True)
disc_logits = self.conv_disc(x).squeeze()
mu = self.conv_mu(x).squeeze()
var = torch.exp(self.conv_var(x).squeeze())
return disc_logits, mu, var가중치, 노이즈, loss function
import torch
import torch.nn as nn
import numpy as np
def weights_init(m):
"""
Initialise weights of the model.
"""
if(type(m) == nn.ConvTranspose2d or type(m) == nn.Conv2d):
nn.init.normal_(m.weight.data, 0.0, 0.02)
elif(type(m) == nn.BatchNorm2d):
nn.init.normal_(m.weight.data, 1.0, 0.02)
nn.init.constant_(m.bias.data, 0)
class NormalNLLLoss:
"""
Calculate the negative log likelihood
of normal distribution.
This needs to be minimised.
Treating Q(cj | x) as a factored Gaussian.
"""
def __call__(self, x, mu, var):
logli = -0.5 * (var.mul(2 * np.pi) + 1e-6).log() - (x - mu).pow(2).div(var.mul(2.0) + 1e-6)
nll = -(logli.sum(1).mean())
return nll
def noise_sample(n_dis_c, dis_c_dim, n_con_c, n_z, batch_size, device):
"""
Sample random noise vector for training.
INPUT
--------
n_dis_c : Number of discrete latent code.
dis_c_dim : Dimension of discrete latent code.
n_con_c : Number of continuous latent code.
n_z : Dimension of iicompressible noise.
batch_size : Batch Size
device : GPU/CPU
"""
z = torch.randn(batch_size, n_z, 1, 1, device=device)
idx = np.zeros((n_dis_c, batch_size))
if(n_dis_c != 0):
dis_c = torch.zeros(batch_size, n_dis_c, dis_c_dim, device=device)
for i in range(n_dis_c):
idx[i] = np.random.randint(dis_c_dim, size=batch_size)
dis_c[torch.arange(0, batch_size), i, idx[i]] = 1.0
dis_c = dis_c.view(batch_size, -1, 1, 1)
if(n_con_c != 0):
# Random uniform between -1 and 1.
con_c = (torch.rand(batch_size, n_con_c, 1, 1, device=device) * 2 - 1)
noise = z
if(n_dis_c != 0):
noise = torch.cat((z, dis_c), dim=1)
if(n_con_c != 0):
noise = torch.cat((noise, con_c), dim=1)
return noise, idxMNIST의 경우에 digit type을 나타내는 변수 10개와 rotaion, width를 나타내는 변수 2개에 62개의노이즈를 추가해서 총 72개의 z로 시작합니다.
Train
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision.utils as vutils
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import time
import random
# Set random seed for reproducibility.
seed = 20240409
random.seed(seed)
torch.manual_seed(seed)
print("Random Seed: ", seed)
# Use GPU if available.
device = torch.device("cuda:0" if(torch.cuda.is_available()) else "cpu")
print(device, " will be used.\n")
dataloader = get_data(params['dataset'], params['batch_size'])
# Set appropriate hyperparameters depending on the dataset used.
# The values given in the InfoGAN paper are used.
# num_z : dimension of incompressible noise.
# num_dis_c : number of discrete latent code used.
# dis_c_dim : dimension of discrete latent code.
# num_con_c : number of continuous latent code used.
# num_z 62 -> 61, num_con_c 2 -> 3
if(params['dataset'] == 'MNIST'):
params['num_z'] = 62
params['num_dis_c'] = 1
params['dis_c_dim'] = 10
params['num_con_c'] = 2
elif(params['dataset'] == 'FashionMNIST'):
params['num_z'] = 62
params['num_dis_c'] = 1
params['dis_c_dim'] = 10
params['num_con_c'] = 2
# Plot the training images.
sample_batch = next(iter(dataloader))
plt.figure(figsize=(10, 10))
plt.axis("off")
plt.imshow(np.transpose(vutils.make_grid(
sample_batch[0].to(device)[ : 100], nrow=10, padding=2, normalize=True).cpu(), (1, 2, 0)))
plt.savefig('Training Images {}'.format(params['dataset']))
plt.close('all')
# Initialise the network.
netG = Generator().to(device)
netG.apply(weights_init)
print(netG)
discriminator = Discriminator().to(device)
discriminator.apply(weights_init)
print(discriminator)
netD = DHead().to(device)
netD.apply(weights_init)
print(netD)
netQ = QHead().to(device)
netQ.apply(weights_init)
print(netQ)
# Loss for discrimination between real and fake images.
criterionD = nn.BCELoss()
# Loss for discrete latent code.
criterionQ_dis = nn.CrossEntropyLoss()
# Loss for continuous latent code.
criterionQ_con = NormalNLLLoss()
# Adam optimiser is used.
optimD = optim.Adam([{'params': discriminator.parameters()}, {'params': netD.parameters()}], lr=params['learning_rate'], betas=(params['beta1'], params['beta2']))
optimG = optim.Adam([{'params': netG.parameters()}, {'params': netQ.parameters()}], lr=params['learning_rate'], betas=(params['beta1'], params['beta2']))
# Fixed Noise
z = torch.randn(100, params['num_z'], 1, 1, device=device)
fixed_noise = z
if(params['num_dis_c'] != 0):
idx = np.arange(params['dis_c_dim']).repeat(10)
dis_c = torch.zeros(100, params['num_dis_c'], params['dis_c_dim'], device=device)
for i in range(params['num_dis_c']):
dis_c[torch.arange(0, 100), i, idx] = 1.0
dis_c = dis_c.view(100, -1, 1, 1)
fixed_noise = torch.cat((fixed_noise, dis_c), dim=1)
if(params['num_con_c'] != 0):
# 회전, 너비 등을 더 자세히 보기위함
con_c = (torch.rand(100, params['num_con_c'], 1, 1, device=device) * 2 - 1)
fixed_noise = torch.cat((fixed_noise, con_c), dim=1)
real_label = 1
fake_label = 0
# List variables to store results pf training.
img_list = []
G_losses = []
D_losses = []
print("-"*25)
print("Starting Training Loop...\n")
print('Epochs: %d\nDataset: {}\nBatch Size: %d\nLength of Data Loader: %d'.format(params['dataset']) % (params['num_epochs'], params['batch_size'], len(dataloader)))
print("-"*25)
start_time = time.time()
iters = 0
for epoch in range(params['num_epochs']):
epoch_start_time = time.time()
for i, (data, _) in tqdm(enumerate(dataloader, 0)):
# Get batch size
b_size = data.size(0)
# Transfer data tensor to GPU/CPU (device)
real_data = data.to(device)
# Updating discriminator and DHead
optimD.zero_grad()
# Real data
label = torch.full((b_size, ), real_label, device=device)
# label type을 맞추기 위해 추가
label=label.to(torch.float32)
output1 = discriminator(real_data)
probs_real = netD(output1).view(-1)
loss_real = criterionD(probs_real, label)
# Calculate gradients.
loss_real.backward()
# Fake data
label.fill_(fake_label)
noise, idx = noise_sample(params['num_dis_c'], params['dis_c_dim'], params['num_con_c'], params['num_z'], b_size, device)
fake_data = netG(noise)
output2 = discriminator(fake_data.detach())
probs_fake = netD(output2).view(-1)
loss_fake = criterionD(probs_fake, label)
# Calculate gradients.
loss_fake.backward()
# Net Loss for the discriminator
D_loss = loss_real + loss_fake
# Update parameters
optimD.step()
# Updating Generator and QHead
optimG.zero_grad()
# Fake data treated as real.
output = discriminator(fake_data)
label.fill_(real_label)
probs_fake = netD(output).view(-1)
gen_loss = criterionD(probs_fake, label)
q_logits, q_mu, q_var = netQ(output)
target = torch.LongTensor(idx).to(device)
# Calculating loss for discrete latent code.
dis_loss = 0
for j in range(params['num_dis_c']):
dis_loss += criterionQ_dis(q_logits[:, j*10 : j*10 + 10], target[j])
# Calculating loss for continuous latent code.
con_loss = 0
if (params['num_con_c'] != 0):
con_loss = criterionQ_con(noise[:, params['num_z']+ params['num_dis_c']*params['dis_c_dim'] : ].view(-1, params['num_con_c']), q_mu, q_var)*0.1
# Net loss for generator.
G_loss = gen_loss + dis_loss + con_loss
# Calculate gradients.
G_loss.backward()
# Update parameters.
optimG.step()
# Check progress of training.
if i != 0 and i%100 == 0:
print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f'
% (epoch+1, params['num_epochs'], i, len(dataloader),
D_loss.item(), G_loss.item()))
# Save the losses for plotting.
G_losses.append(G_loss.item())
D_losses.append(D_loss.item())
iters += 1
epoch_time = time.time() - epoch_start_time
print("Time taken for Epoch %d: %.2fs" %(epoch + 1, epoch_time))
# Generate image after each epoch to check performance of the generator. Used for creating animated gif later.
with torch.no_grad():
gen_data = netG(fixed_noise).detach().cpu()
img_list.append(vutils.make_grid(gen_data, nrow=10, padding=2, normalize=True))
# Generate image to check performance of generator.
if((epoch+1) == 1 or (epoch+1) == params['num_epochs']/2) or epoch%5==0:
with torch.no_grad():
gen_data = netG(fixed_noise).detach().cpu()
plt.figure(figsize=(10, 10))
plt.axis("off")
plt.imshow(np.transpose(vutils.make_grid(gen_data, nrow=10, padding=2, normalize=True), (1,2,0)))
plt.savefig("Epoch_%d {}".format(params['dataset']) %(epoch+1))
plt.close('all')
# Save network weights.
if (epoch+1) % params['save_epoch'] == 0:
torch.save({
'netG' : netG.state_dict(),
'discriminator' : discriminator.state_dict(),
'netD' : netD.state_dict(),
'netQ' : netQ.state_dict(),
'optimD' : optimD.state_dict(),
'optimG' : optimG.state_dict(),
'params' : params
}, 'InfoGAN/model_epoch_%d_{}'.format(params['dataset']) %(epoch+1))
training_time = time.time() - start_time
print("-"*50)
print('Training finished!\nTotal Time for Training: %.2fm' %(training_time / 60))
print("-"*50)
# Generate image to check performance of trained generator.
with torch.no_grad():
gen_data = netG(fixed_noise).detach().cpu()
plt.figure(figsize=(10, 10))
plt.axis("off")
plt.imshow(np.transpose(vutils.make_grid(gen_data, nrow=10, padding=2, normalize=True), (1,2,0)))
plt.savefig("Epoch_%d_{}".format(params['dataset']) %(params['num_epochs']))
# Save network weights.
torch.save({
'netG' : netG.state_dict(),
'discriminator' : discriminator.state_dict(),
'netD' : netD.state_dict(),
'netQ' : netQ.state_dict(),
'optimD' : optimD.state_dict(),
'optimG' : optimG.state_dict(),
'params' : params
}, 'InfoGAN/model_final_{}'.format(params['dataset']))
# Plot the training losses.
plt.figure(figsize=(10,5))
plt.title("Generator and Discriminator Loss During Training")
plt.plot(G_losses,label="G")
plt.plot(D_losses,label="D")
plt.xlabel("iterations")
plt.ylabel("Loss")
plt.legend()
plt.savefig("Loss Curve {}".format(params['dataset']))
# Animation showing the improvements of the generator.
fig = plt.figure(figsize=(10,10))
plt.axis("off")
ims = [[plt.imshow(np.transpose(i,(1,2,0)), animated=True)] for i in img_list]
anim = animation.ArtistAnimation(fig, ims, interval=1000, repeat_delay=1000, blit=True)
anim.save('infoGAN_{}.gif'.format(params['dataset']), dpi=80, writer='imagemagick')
plt.show()이렇게 돌리면 오류가 나는 부분이 있는데, torch.save쪽에서 오류가 납니다. 저장할때 MNIST data에 대해서 수행했다면 ‘InfoGAN/model_final_MNIST’ 에 저장이 됩니다. 즉, InfoGAN 파일에 model_final_MNIST로 저장이 되는데 저희는 코랩에서 아무것도 건드리지 않았기 때문에 InfoGAN 파일이 없죠. 그래서 직접 만들어야 합니다. 만들면 이 오류는 없어지게 됩니다!
InfoGAN 파일을 위 처럼 만드셨다면 문제없이 실행됩니다.
또한 label=label.to(torch.float32) 부분은 label의 type이 torch.long 형태에서 ‘loss_real = criterionD(probs_real, label)’ 이부분에서 오류가 납니다.(probs_real은 float형태기 때문에)
따라서 probs_real과 type을 동일하게 하기 위해 float으로 변경하였습니다.
마지막으로 if((epoch+1) == 1) or epoch%5==0: 이 부분은 epoch이 5의 배수만큼 돌았을 때 사진을 출력하도록 변경하였습니다.
이렇게 설정하고 나서 분석을 수행한 결과를 보여드리겠습니다.
아무런 정보도 없었는데, 그래도 잘 분류하네요!
이제 숫자 말고 $c_2$, $c_3$(Rotation,Width)을 uniform 분포에서 변경할수록 어떻게 변화하는지 살펴보도록 하겠습니다.
Feature
import argparse
import torch
import torchvision.utils as vutils
import numpy as np
import matplotlib.pyplot as plt
parser = argparse.ArgumentParser()
parser.add_argument('-load_path', required=True, help='Checkpoint to load path from')
args = parser.parse_args(['-load_path', 'InfoGAN/model_final_MNIST'])
# from models.mnist_model import Generator
# Load the checkpoint file
state_dict = torch.load(args.load_path)
# Set the device to run on: GPU or CPU.
device = torch.device("cuda:0" if(torch.cuda.is_available()) else "cpu")
# Get the 'params' dictionary from the loaded state_dict.
params = state_dict['params']
# Create the generator network.
netG = Generator().to(device)
# Load the trained generator weights.
netG.load_state_dict(state_dict['netG'])
print(netG)
c = np.linspace(-2, 2, 10).reshape(1, -1)
c = np.repeat(c, 10, 0).reshape(-1, 1)
c = torch.from_numpy(c).float().to(device)
c = c.view(-1, 1, 1, 1)
zeros = torch.zeros(100, 1, 1, 1, device=device)
# Continuous latent code.
c2 = torch.cat((c, zeros), dim=1)
c3 = torch.cat((zeros, c), dim=1)
# c4 = torch.cat((zeros, c), dim=1)
idx = np.arange(10).repeat(10)
dis_c = torch.zeros(100, 10, 1, 1, device=device)
dis_c[torch.arange(0, 100), idx] = 1.0
# Discrete latent code.
c1 = dis_c.view(100, -1, 1, 1)
z = torch.randn(100, 62, 1, 1, device=device)
# To see variation along c2 (Horizontally) and c1 (Vertically)
noise1 = torch.cat((z, c1, c2), dim=1)
# To see variation along c3 (Horizontally) and c1 (Vertically)
noise2 = torch.cat((z, c1, c3), dim=1)
# # To see variation along c4 (Horizontally) and c1 (Vertically)
# noise3 = torch.cat((z, c1, c4), dim=1)
# Generate image.
with torch.no_grad():
generated_img1 = netG(noise1).detach().cpu()
# Display the generated image.
fig = plt.figure(figsize=(10, 10))
plt.axis("off")
plt.imshow(np.transpose(vutils.make_grid(generated_img1, nrow=10, padding=2, normalize=True), (1,2,0)))
plt.show()
# Generate image.
with torch.no_grad():
generated_img2 = netG(noise2).detach().cpu()
# Display the generated image.
fig = plt.figure(figsize=(10, 10))
plt.axis("off")
plt.imshow(np.transpose(vutils.make_grid(generated_img2, nrow=10, padding=2, normalize=True), (1,2,0)))
plt.show()
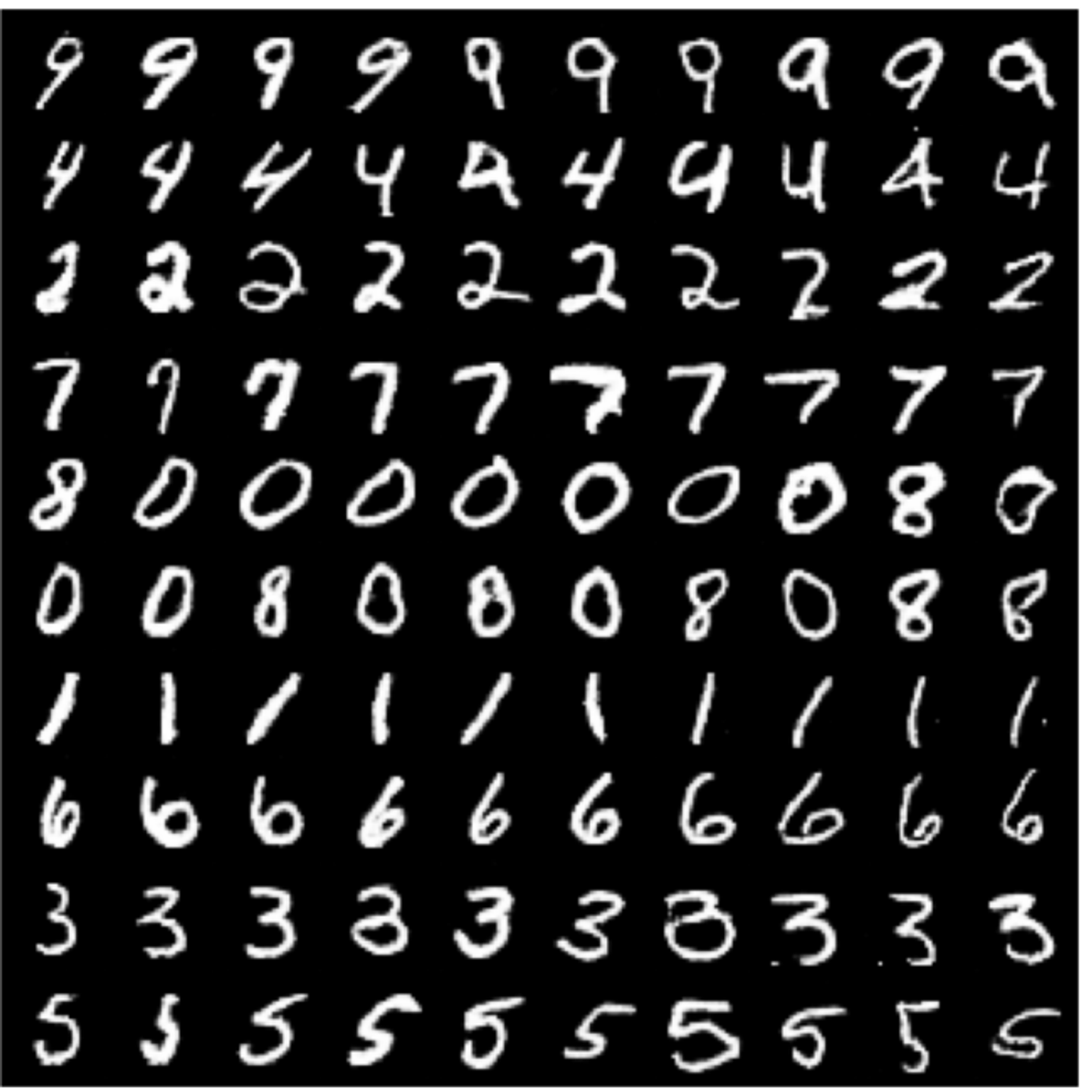
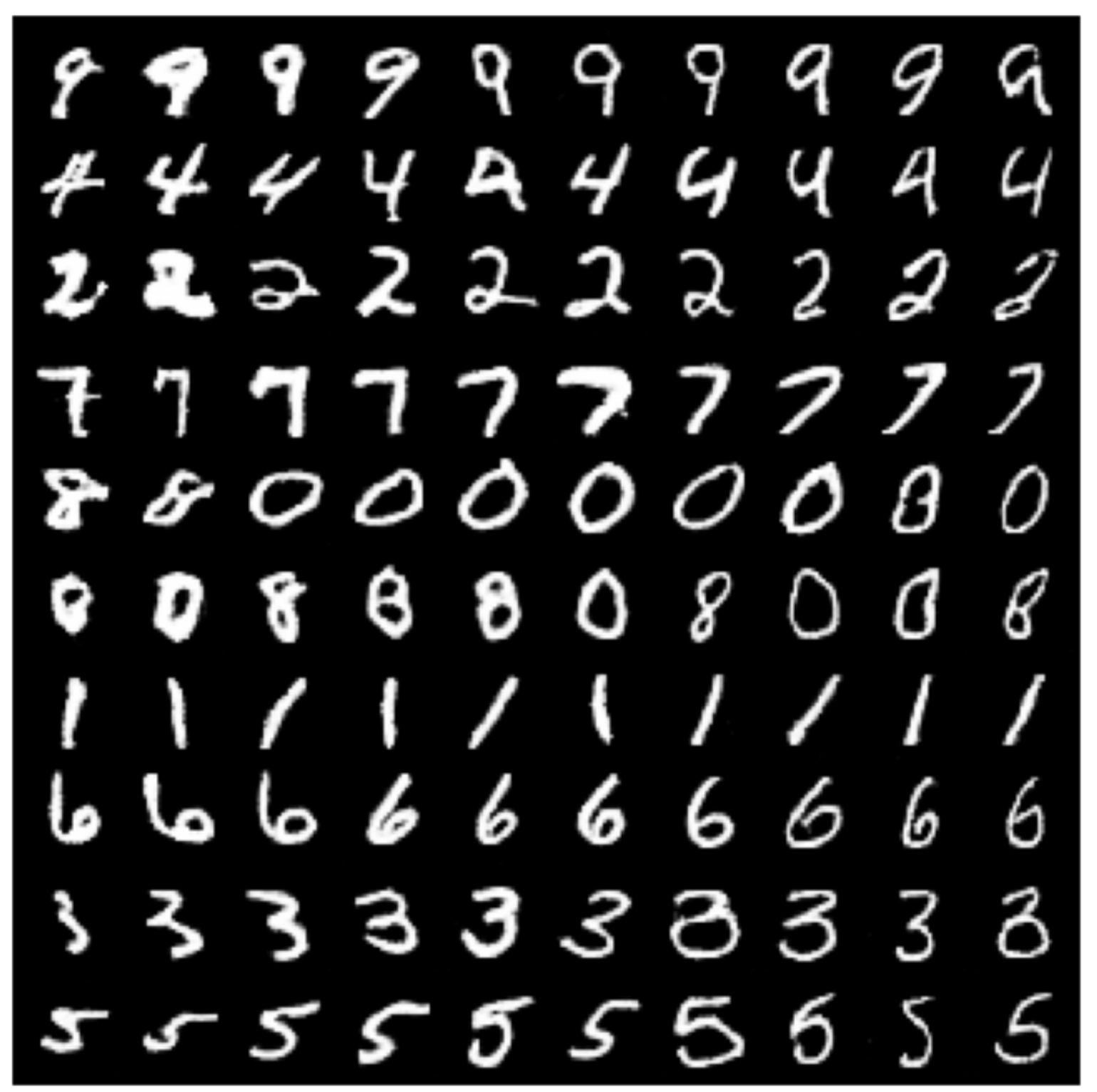
결과를 보시면 오른쪽에서 왼쪽으로 갈수록 Rotaiton, Width의 특징을 학습하고 있다고 볼 수 있을 것 같습니다!
Rotation의 경우에는 조금씩 기울어지고있으며, Width의 경우에는 너비가 조금씩 커지는 것을 확인할 수 있었습니다!
논문에서와는 달리 뚜렷한 결과를 보이지 않고, 두 변수간에 섞임이 조금 있어보이는 것 같습니다. Width에서도 약간 기울어지며 생성이 되는듯한 모습을 보이고, Rotation에서도 약간 너비가 커져가는 것을 보이는 듯 합니다!
참고문헌
감사합니다!